

La demolición de estructuras conmueve hasta a los menos interesados. Ver cómo una construcción enorme desaparece de forma controlada, casi quirúrgica, tiene algo de hipnótico. Pero quienes trabajamos cerca de una obra sabemos que detrás de esa imagen hay mucho más que fuerza bruta: hay planificación, cálculo, control de cargas, gestión de residuos, seguridad laboral y una elección muy fina de la maquinaria.
Nota sobre Seguridad y Procedimiento Técnico
El uso de robots de demolición debe estar integrado en un Plan de Demolición visado y supervisado por la Dirección Facultativa. La información técnica aquí expuesta cumple con los estándares de seguridad de OSHA (2025) y el Reglamento UE 2023/1230, pero no sustituye el cálculo de cargas estructurales ni la evaluación de riesgos específica de cada obra. Verifique siempre la capacidad portante del forjado antes de posicionar y estabilizar maquinaria pesada en interiores.
Cuando trabajas en una obra compleja, el problema rara vez consiste solo en “tirar algo”. Lo delicado es retirar lo que sobra sin dañar lo que debe permanecer en pie, sin comprometer la estabilidad del entorno y sin exponer al operario más de lo necesario. En interiores industriales, túneles, sótanos, plantas en funcionamiento o edificios con accesos limitados, la demolición convencional puede quedarse corta o directamente no ser viable.
Por eso, para quienes trabajan en esto, elegir bien la maquinaria industrial de demolición condiciona la seguridad, la precisión y el ritmo de trabajo. Los robots de demolición entran precisamente ahí: son equipos compactos, controlados a distancia y preparados para accionar herramientas potentes en zonas donde una excavadora, una máquina pesada tradicional o un equipo manual tendrían demasiadas limitaciones.
A lo largo de este artículo vas a ver cómo funcionan los robots de demolición en obras complejas, qué partes componen el sistema, qué ventajas aportan, qué errores conviene evitar y qué criterios deberías revisar antes de incorporar uno a una intervención real. La idea no es venderte la tecnología como solución universal, sino explicarte cuándo tiene sentido, cómo se integra en obra y qué debes mirar con ojos de ingeniero antes de tomar una decisión.
Qué son los robots de demolición y para qué se utilizan

Un robot de demolición es una unidad compacta de trabajo, normalmente sobre orugas, diseñada para operar herramientas de demolición mediante un sistema hidráulico y un mando a distancia. A simple vista puede parecer una máquina pequeña, pero conviene no quedarse en el tamaño. Su valor está en la relación entre potencia, movilidad, alcance y control.
En la práctica, estos equipos se utilizan cuando necesitas intervenir en entornos donde el acceso, la seguridad o la precisión pesan más que la capacidad bruta de una máquina grande. Por ejemplo, en una nave industrial donde hay que retirar bancadas de hormigón sin desmontar media instalación, en un sótano con forjados limitados, en un túnel con ventilación condicionada o en una planta donde sigue habiendo actividad alrededor.
Elementos funcionales esenciales
Del chasis compacto a la herramienta de corte: seis componentes críticos encadenados que definen la eficiencia y seguridad en demoliciones urbanas tecnificadas.
Chasis compacto sobre orugas para movilidad urbana
Diseño que maximiza la tracción y maniobrabilidad en espacios reducidos de obras en distritos densos como San Martín de Porres, facilitando el acceso a interiores.
Movilidad trackedGrupo eléctrico o diésel-hidráulico de alta potencia
Corazón del sistema que proporciona la energía hidráulica necesaria para operar el brazo articulado y las herramientas de corte, adaptándose a las regulaciones de emisiones.
Suministro de energíaBrazo articulado multifunción con múltiples grados de libertad
Capaz de maniobrar en ángulos complejos y alcanzar zonas de difícil acceso para ejecutar la demolición con precisión clínica, minimizando riesgos.
Sistema articuladoSistema de estabilización para operaciones seguras
Despliega apoyos robustos para garantizar la estabilidad de la máquina durante el trabajo intensivo, protegiendo al operador y la integridad de la estructura circundante.
EstabilizaciónMando remoto para control a distancia de la demolición
Permite al operador controlar todas las funciones de forma remota, manteniéndose fuera de la zona de riesgo, mejorando la seguridad en obras urbanas tecnificadas.
Control electrónicoHerramienta intercambiable adaptada al trabajo específico
Un acople rápido permite alternar entre martillos, cizallas, pinzas u otros implementos según las necesidades de cada fase de la demolición urbana.
HerramientaLa clave está en que el operario no necesita estar pegado al punto de demolición. Puede situarse en una zona con mejor visibilidad, menor exposición al polvo y más distancia frente a desprendimientos, vibraciones o proyecciones. Esto no elimina los riesgos de la obra, pero cambia radicalmente la forma de gestionarlos.
Además, estos equipos no sustituyen siempre a la maquinaria pesada, de hecho sería un error plantearlo así. Una excavadora sigue teniendo todo el sentido en demoliciones abiertas, movimiento de tierras o derribos con espacio suficiente. El robot encaja mejor cuando la obra exige maniobrabilidad, control fino y una intervención selectiva.
Diferencias frente a la demolición convencional
La demolición convencional suele apoyarse en excavadoras, retroexcavadoras, martillos manuales, minicargadoras o herramientas portátiles, y cada solución tiene su sitio. El robot de demolición no compite con todas ellas en cualquier escenario; entra cuando la obra pide precisión y seguridad en condiciones incómodas.
La diferencia más clara está en la forma de trabajar. Una excavadora necesita una cabina, espacio de giro, accesos amplios y un terreno que soporte su peso. Un equipo manual permite entrar en zonas más estrechas, pero exige que el operario soporte vibraciones, polvo, ruido y esfuerzo físico durante más tiempo.
El robot se coloca en un punto intermedio muy interesante: mantiene capacidad mecánica, reduce la presencia directa del operario en la zona de ataque y se mueve en espacios donde una máquina mayor tendría problemas.
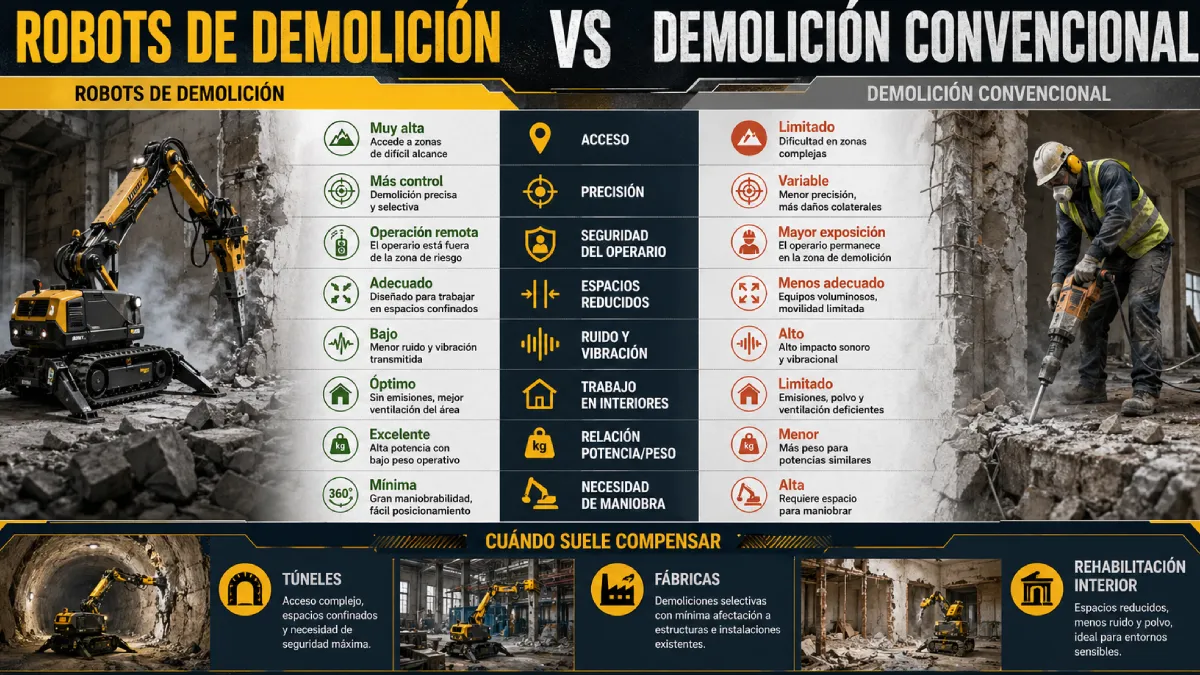
Robot vs. Demolición Convencional
El uso de robots de demolición en espacios urbanos y confinados (como distritos densos en Lima) representa un salto cualitativo frente a los métodos tradicionales en términos de seguridad y eficiencia operativa.
| Aspecto evaluado | Robot de demolición | Demolición convencional |
|---|---|---|
|
Control
|
Remoto, con operario separado de la zona directa |
Presencial en cabina o junto a la herramienta |
|
Acceso
|
Adecuado para interiores, pasos estrechos y zonas restringidas |
Requiere más espacio, sobre todo con maquinaria pesada |
|
Precisión
|
Alta en trabajos selectivos y rehabilitación |
Variable según el volumen del equipo y el entorno |
|
Exposición del operario
|
Menor exposición directa a polvo, ruido y derrumbes |
Mayor exposición en trabajos manuales o zonas inestables |
|
Potencia
|
Muy alta en relación a su tamaño compacto |
Muy alta en equipos pesados, pero menor en herramientas manuales |
|
Uso ideal
|
Obras complejas, interiores, túneles, rehabilitación estructural |
Demoliciones a cielo abierto, grandes volúmenes, trabajos exteriores |
La diferencia técnica también está en el planteamiento. Un robot de demolición está pensado para alimentar herramientas de trabajo exigentes: martillos, pinzas, cizallas o fresadoras. No es una excavadora pequeña sin cabina. Es una plataforma hidráulica compacta diseñada para transmitir energía a un implemento concreto con control y estabilidad.
Por eso, cuando analizas la implementación de estos en obras complejas, conviene pensar en el conjunto completo: máquina, accesorio, estructura, acceso, operador y entorno. Si falla una de esas piezas, el rendimiento baja y el riesgo sube.
Casos habituales: túneles, interiores, plantas industriales y zonas urbanas
Los robots de demolición se ven cada vez más en trabajos donde hay restricciones físicas, ambientales o productivas. En España, basta pensar en rehabilitación de edificios, mantenimiento industrial, estaciones, galerías técnicas, túneles, hospitales, aparcamientos subterráneos o fábricas que no pueden parar durante semanas.
Algunos casos habituales son:
- Interiores industriales: retirada de bancadas, soleras, muros interiores, cimentaciones secundarias, escaleras, apoyos obsoletos o elementos de hormigón armado dentro de fábricas.
- Túneles y galerías: saneo de revestimientos, retirada de hormigón deteriorado, apertura de nichos, trabajos en hastiales o intervención en zonas donde la ventilación y el acceso son críticos.
- Edificios en rehabilitación: demolición parcial de forjados, tabiques resistentes, escaleras o elementos estructurales bajo una planificación muy controlada.
- Zonas urbanas densas: intervenciones donde hay límites de ruido, vibración, polvo, horarios o convivencia con actividad cercana.
- Plantas de proceso: trabajos en cementeras, siderurgia, químicas, papeleras o instalaciones con estructuras robustas y accesos poco agradecidos.
En estos escenarios, lo importante no es solo la potencia, sino el poder meter la máquina, posicionarla, estabilizarla, controlar la herramienta y retirar el material sin generar un problema mayor que el que quieres resolver.
Cómo funcionan los robots de demolición en obra
Para entender bien el funcionamiento, imagina el robot como una plataforma móvil de potencia hidráulica. El chasis permite llegar hasta la zona de trabajo; el grupo hidráulico genera la energía; el brazo posiciona la herramienta; el accesorio ejecuta la demolición; y el operario gobierna el conjunto desde un mando remoto.
Funcionamiento y secuencia operativa
Para entender el sistema, imagina el robot como una plataforma móvil de potencia hidráulica. Cada módulo tiene un propósito específico que culmina en una demolición controlada y eficiente.
El robot como plataforma móvil
Secuencia lógica del proceso
Análisis de la zona y del elemento
Se evalúa detenidamente el entorno de trabajo y la estructura específica que se va a demoler para planificar la intervención.
Verificación técnica estructural
Se comprueban los accesos, la capacidad de carga del forjado para soportar el equipo y las rutas de evacuación de escombros.
Selección del robot adecuado
Se elige el modelo específico basándose en el peso máximo admitido por la estructura, alcance necesario, potencia y requerimientos de movilidad.
Elección de la herramienta
Se acopla el implemento ideal para el material (martillo hidráulico, cizalla, pinza demoledora, etc.) maximizando la eficacia de rotura.
Posicionamiento y estabilización
El robot se ubica en el punto óptimo y despliega sus estabilizadores para garantizar una base firme durante la operación de impacto.
Ejecución desde zona segura
El operario dirige la demolición a través del mando remoto, manteniéndose fuera del área de riesgo por caída de cascotes, con visibilidad total.
Retirada controlada de escombros
Se evacuan los residuos de forma continua o pautada para evitar sobrecargar la estructura de soporte durante el avance de la obra.
Este último punto se pasa por alto más de lo que debería. En una demolición interior, el peso del escombro acumulado puede ser tan importante como el peso de la máquina. Si picas un forjado, pero dejas el material apilado sobre una zona comprometida, estás trasladando el problema de un sitio a otro.
Desde el punto de vista de seguridad, OSHA insiste en que antes de iniciar una demolición conviene planificar el método, los equipos y las medidas preventivas, porque esa preparación condiciona el rendimiento y la protección del personal en obra (OSHA, 2025). Esa lógica encaja perfectamente con el uso de robots: la máquina ayuda, pero no sustituye al análisis previo.
Control remoto, brazos hidráulicos y herramientas intercambiables
El control remoto es una de las grandes diferencias operativas. El operario maneja el robot mediante un mando que permite controlar desplazamiento, giro, estabilizadores, brazo y herramienta. Esto le permite apartarse de la zona directa de demolición y colocarse donde tenga mejor visión del trabajo.
En obras con polvo, ruido, elementos inestables o riesgo de desprendimiento, esa distancia marca una diferencia importante. Aun así, conviene ser prudente: el control remoto no convierte la obra en segura por arte de magia. Hace falta delimitar zonas, coordinar equipos, controlar interferencias y mantener comunicación constante.
El brazo hidráulico es el otro elemento clave. Su función no es solo alcanzar el punto de trabajo, sino colocar la herramienta en el ángulo correcto. En demolición, atacar mal un elemento puede multiplicar vibraciones, reducir rendimiento o dañar zonas que no estaban previstas.
Las herramientas intercambiables dan versatilidad al equipo. Un mismo robot puede cambiar completamente de función según el accesorio que monte. Por eso, antes de elegir máquina, conviene revisar:
- Caudal hidráulico disponible
- Presión de trabajo
- Peso máximo admisible del accesorio
- Tipo de acople
- Necesidad de rotación
- Compatibilidad eléctrica o hidráulica
- Condiciones térmicas y ambientales.
En Europa, la maquinaria comercializada debe cumplir requisitos de salud y seguridad desde su diseño y fabricación, algo especialmente relevante cuando hablamos de equipos avanzados, accionamientos hidráulicos y control a distancia (Reglamento UE 2023/1230). Esta exigencia no sustituye a la evaluación de riesgos de obra, pero sí fija una base técnica de diseño que el comprador y el usuario deben tener presente.
Martillos, pinzas, cizallas y fresadoras según el trabajo
El rendimiento real del robot depende mucho del accesorio. A veces se habla del robot como si fuese el protagonista absoluto, pero en obra el implemento manda bastante. No es lo mismo romper una solera que cortar una viga metálica o fresar una capa deteriorada de hormigón.
El martillo es el accesorio más reconocible. Funciona bien cuando necesitas energía de impacto y avance rápido, aunque puede generar más ruido y vibración que otras alternativas. La pinza, en cambio, resulta muy útil cuando interesa fragmentar con más control, especialmente en interiores o zonas sensibles.
Las cizallas entran en trabajos de desmantelamiento industrial, donde aparecen perfiles, tuberías, soportes, bandejas o elementos metálicos que no quieres cortar manualmente. La fresadora es especialmente interesante en rehabilitación, porque permite retirar capas de material con mayor regularidad y preparar superficies para fases posteriores.
Una regla práctica: si el accesorio no encaja con el material, el robot trabajará mal aunque sea muy bueno. Por eso, en la fase de planificación no basta con preguntar “qué robot necesito”; hay que preguntar “qué conjunto robot-herramienta-entorno necesito”.
Ventajas operativas en obras complejas
Los robots de demolición aportan ventajas claras cuando la obra tiene restricciones. No conviene presentarlos como una solución mágica, porque siguen necesitando planificación, personal formado y mantenimiento. Pero cuando encajan, pueden mejorar mucho el control del trabajo.
Sus ventajas principales son:
- Mayor distancia entre operario y zona de riesgo
- Buena relación potencia-peso
- Capacidad de trabajar en interiores y espacios estrechos
- Precisión en demoliciones parciales
- Menor dependencia de tareas manuales pesadas
- Ritmo más constante en trabajos repetitivos
- Posibilidad de montar accesorios diferentes
- Reducción de emisiones locales si el equipo es eléctrico.
Husqvarna Construction describe este tipo de equipos como soluciones de demolición remota para aplicaciones industriales donde se combinan potencia, alcance y acceso complicado (Husqvarna Construction, 2026). Llevado a obra, eso se traduce en una idea sencilla: puedes intervenir donde antes necesitabas una combinación menos eficiente de herramienta manual, apeos, maquinaria auxiliar y mucho esfuerzo operativo.
Ahora bien, hay que valorar la obra completa. Si tienes un derribo exterior amplio, buen acceso y volumen elevado de material, quizá una excavadora sea más productiva. Si tienes una planta industrial con accesos estrechos, personal cerca, estructuras que conservar y tiempos de parada limitados, el robot empieza a tener mucho sentido.
1. Más precisión en espacios reducidos
En espacios reducidos, la precisión es una condición de trabajo. Una nave antigua con pilares cercanos, una sala técnica con instalaciones activas o un sótano con acceso por rampa estrecha no perdonan errores de maniobra.
Los robots de demolición suelen tener dimensiones contenidas, orugas con buena tracción y capacidad de giro sobre sí mismos. Esto permite colocarlos en posiciones donde una máquina convencional no podría trabajar. Además, el brazo articulado facilita atacar el material desde distintos ángulos sin recolocar continuamente el equipo.
En estos trabajos, los puntos que más conviene revisar son:
- Anchura real de puertas y pasos
- Altura libre en recorridos interiores
- Pendientes de rampas
- Capacidad de escaleras o montacargas
- Radio de giro disponible
- Interferencias con instalaciones existentes
- Distancia hasta zonas ocupadas o en servicio.
Un ejemplo típico sería la retirada de una bancada de hormigón en una fábrica. La bancada puede estar rodeada de pilares, bandejas de cable, tuberías y maquinaria que sigue operativa. En este tipo de situaciones, un robot con pinza o martillo permite trabajar con más control que un método manual prolongado o una máquina demasiado voluminosa.
2. Menor exposición del operario a polvo, ruido y zonas inestables
La demolición siempre implica incertidumbre. Aunque haya proyecto, catas, planos y planificación, al abrir una estructura aparecen armaduras no previstas, hormigones de distinta calidad, juntas antiguas, reparaciones ocultas o instalaciones fuera de plano. Por eso, cuanto menos tenga que estar el operario dentro de la zona directa de ataque, mejor.
El control remoto permite alejar al trabajador del punto donde se generan impactos, desprendimientos, polvo y vibraciones. Esto tiene importancia en trabajos con hormigón, materiales envejecidos, ambientes confinados o estructuras parcialmente deterioradas.
Los riesgos que se reducen o gestionan mejor son:
- Proyección de fragmentos
- Caída de material
- Exposición directa a polvo
- Ruido intenso junto a la herramienta
- Vibraciones transmitidas al cuerpo
- Posturas forzadas durante periodos largos
- Trabajo en zonas con estabilidad dudosa.
Aquí hay que decirlo claro: el robot no elimina la obligación de ventilar, regar, aspirar, señalizar, usar EPIs o controlar accesos. Lo que hace es mejorar la posición de trabajo del operario y reducir tareas manuales especialmente exigentes.
3. Mejor rendimiento en trabajos repetitivos o de difícil acceso
La demolición manual tiene un límite evidente: la fatiga. Un operario con martillo manual no mantiene la misma precisión, fuerza y concentración durante toda la jornada. En trabajos prolongados, ese desgaste acaba afectando al rendimiento y a la seguridad.
El robot permite mantener un ritmo más estable. Mientras el equipo esté bien dimensionado y la herramienta sea la adecuada, la producción depende menos del esfuerzo físico directo. Esto resulta especialmente útil en saneos, retirada de hormigón, picados repetitivos o trabajos por fases dentro de una infraestructura.
En la práctica, se nota en situaciones como estas:
- Saneo de túneles: el brazo llega a zonas altas o incómodas sin que el operario tenga que exponerse bajo el punto de trabajo.
- Picado de soleras industriales: el robot puede mantener una cadencia constante con martillo o pinza, siempre que la retirada de escombros acompañe.
- Demolición interior por fases: permite trabajar en zonas concretas, respetando elementos que deben permanecer.
- Desmantelamiento parcial: con cizallas o pinzas, se pueden retirar piezas concretas con más control que mediante métodos menos selectivos.
El rendimiento, aun así, no depende solo de la máquina. Si el escombro se acumula, si el acceso eléctrico no está preparado o si la herramienta se cambia tarde, la producción cae. La obra compleja exige mirar el flujo completo: entrada, trabajo, retirada, limpieza y siguiente fase.
Criterios para elegir el equipo adecuado
Elegir un robot de demolición no debería hacerse por catálogo ni por intuición. Conviene plantearlo como una pequeña decisión de ingeniería: qué elemento vas a demoler, dónde está, qué restricciones tienes y qué herramienta necesitas.
Una checklist razonable incluiría:
- Tipo de material
- Espesor y armado
- Altura o profundidad de trabajo
- Restricciones de acceso
- Capacidad del forjado
- Ventilación disponible
- Suministro eléctrico
- Zona de maniobra
- Evacuación de escombros
- Ruido y vibración admisibles
- Herramientas necesarias
- Formación del operario.
El error más común es fijarse solo en la potencia. En obra real, un equipo más potente puede ser peor elección si pesa demasiado, no gira bien, no pasa por el acceso o transmite cargas excesivas a través de estabilizadores.
Otro error frecuente es no coordinar el robot con la logística de residuos. Puedes tener una máquina muy eficiente picando, pero si no retiras el material al mismo ritmo, acabarás con un cuello de botella. En interiores, ese cuello de botella puede convertirse además en un problema estructural por acumulación de carga.
1. Peso, alcance, potencia y movilidad
El peso afecta al transporte, al acceso y a la resistencia de la estructura. En un exterior con terreno firme, puede ser secundario. En un forjado existente, un aparcamiento, una entreplanta o una nave antigua, pasa a ser un criterio central.
El alcance determina desde dónde puedes trabajar. Un brazo con más alcance permite atacar zonas altas o profundas sin mover tanto la máquina, pero también exige revisar estabilidad y herramienta montada. No interesa llevar un accesorio demasiado pesado al extremo del brazo si la tarea no lo justifica.
La potencia condiciona la productividad, sobre todo con hormigón duro, espesores importantes o trabajo continuo. Pero potencia sin control puede generar vibración innecesaria, desgaste de herramienta y daños colaterales.
La movilidad decide si el equipo llega o no llega. En obras complejas, esto incluye detalles muy de obra:
- Si pasa por una puerta
- Si cabe en un ascensor de carga
- Si puede subir una rampa
- Si las orugas dañan el pavimento
- Si tiene espacio para estabilizarse
- Si puede girar sin golpear instalaciones.
Un buen criterio práctico es recorrer mentalmente la ruta completa del robot desde la descarga hasta el punto de trabajo. Si en ese recorrido aparece un punto dudoso, hay que resolverlo antes de que la máquina esté en obra.
2. Compatibilidad con accesorios de demolición técnica
La compatibilidad con accesorios es uno de los aspectos que más influyen en el resultado. Un robot puede admitir varias herramientas, pero no todas trabajarán igual de bien en cada situación. Hay que revisar caudales, presiones, peso, conexiones y necesidades de giro.
Por ejemplo, una fresadora puede requerir un flujo hidráulico estable. Una cizalla necesita fuerza de corte y, en muchos casos, rotación. Una pinza trituradora exige buena capacidad de cierre y control. Un martillo, por su parte, demanda impacto, refrigeración adecuada y mantenimiento de punteros.
Antes de seleccionar accesorio, conviene responder a estas preguntas:
- ¿Qué material se va a retirar?
- ¿Interesa romper, cortar, triturar o fresar?
- ¿Hay armadura o elementos metálicos?
- ¿Qué nivel de vibración es admisible?
- ¿Cuánto ruido puede tolerar el entorno?
- ¿La superficie debe quedar preparada para una fase posterior?
- ¿Hay instalaciones cercanas que deban protegerse?
Este enfoque evita improvisaciones. Cambiar de herramienta en mitad de la obra puede ser normal; descubrir en mitad del trabajo que el robot no alimenta bien el accesorio elegido es otro asunto.
3. Condiciones del entorno: acceso, ventilación y resistencia del forjado
En obra compleja, el entorno manda. Puedes tener el robot adecuado y la herramienta correcta, pero si no hay ventilación, si el cableado estorba, si el suelo no soporta la carga o si no puedes sacar escombros, el trabajo se atasca.
Las condiciones más importantes son:
- Acceso: puertas, rampas, escaleras, radios de giro y zonas de descarga
- Ventilación: especialmente en sótanos, túneles o espacios confinados
- Suministro: potencia eléctrica disponible, protecciones y recorridos de cable
- Forjado: carga admisible durante transporte y durante trabajo estabilizado
- Escombros: retirada continua para evitar acumulaciones
- Interferencias: instalaciones activas, tráfico interno y otros tajos
- Polvo: sistemas de agua, aspiración o confinamiento
- Comunicación: visibilidad y coordinación entre operador y apoyo.
Un detalle importante: la carga no siempre se reparte igual. Durante el desplazamiento, el peso va sobre las orugas. En el trabajo, los estabilizadores pueden concentrar esfuerzos en puntos concretos. Si además hay impacto del martillo y acumulación de escombro, la estructura puede estar sometida a condiciones muy distintas a las previstas en un cálculo simplificado.
Por eso, antes de meter un robot en un edificio existente, conviene revisar planos, hacer inspección previa y consultar con dirección facultativa o estructura cuando haya dudas razonables.
Errores comunes y planificación
Aunque la tecnología robótica es avanzada, los fallos operativos siguen apareciendo. La inmensa mayoría no provienen de la máquina, sino de una planificación incompleta antes de iniciar la obra.
10 errores habituales en obra
Secuencia óptima de preparación
Inspección técnica del entorno.
Identificación de elementos a conservar.
Elección del método de demolición.
Selección de robot y herramienta.
Revisión estructural y logística.
Plan de seguridad y coordinación.
Prueba inicial en zona controlada.
Ajuste de ritmo, herramienta y retirada de material.
Ejemplos reales de uso industrial
Para visualizar mejor cuándo encaja esta tecnología, conviene bajar a casos de obra. No hace falta imaginar situaciones futuristas; hablamos de problemas muy habituales en mantenimiento industrial, obra civil y rehabilitación.
1. Demolición interior en fábricas
Imagina una fábrica con una línea de producción que se va a modernizar. Hay que retirar bancadas antiguas, abrir paso a nuevas instalaciones y eliminar muros interiores. La propiedad quiere reducir la parada de planta y evitar vibraciones excesivas cerca de equipos sensibles.
En ese caso, un robot de demolición compacto puede entrar por un acceso lateral, trabajar con martillo o pinza y retirar hormigón por fases. El operario controla la máquina desde una posición más segura, mientras un equipo auxiliar gestiona escombros y limpieza.
La ventaja empresarial es clara: menos interferencia con la actividad, más control sobre la zona afectada y mejor planificación por turnos. Para un responsable de planta, eso se traduce en menos incertidumbre.
2. Retirada de hormigón en infraestructuras
En túneles, puentes, estaciones o galerías técnicas, el objetivo suele ser retirar material deteriorado sin dañar elementos que deben seguir trabajando. Aquí la precisión pesa mucho.
Un robot con fresadora o martillo puede sanear zonas concretas, abrir huecos técnicos o retirar revestimientos antiguos. Si el entorno tiene poca ventilación, la elección de equipos eléctricos cobra más importancia. Además, el control remoto permite trabajar con más distancia en zonas donde puede haber desprendimientos.
En estos casos, la coordinación con topografía, estructura, ventilación y gestión de residuos resulta fundamental. El robot ejecuta, pero el método lo define la ingeniería previa.
3. Zonas donde no conviene usar maquinaria pesada tradicional
Hay obras en las que una excavadora sería demasiado. No porque falte potencia, sino porque sobran peso, dimensiones o vibración. Piensa en hospitales, centros comerciales, edificios históricos, aparcamientos, sótanos o plantas con actividad parcial.
En esos entornos, el robot permite intervenir con una huella menor. Puede trabajar en franjas horarias concretas, con protecciones específicas y con un área de afección más contenida. Eso facilita compatibilizar demolición con otras actividades, aunque siempre exige una planificación seria.
Soluciones prácticas para integrar robots de demolición en una obra compleja
Si estás valorando usar un robot de demolición, mi recomendación es no empezar por la máquina, sino Empieza por el problema. Parece obvio, pero en obra se ahorra mucho tiempo cuando se define bien qué se quiere conseguir.
Una forma práctica de abordarlo sería esta:
El cuestionario previo en obra
La correcta selección y configuración del equipo robótico no se basa en intuiciones, sino en responder siete preguntas críticas sobre el entorno estructural antes de movilizar la maquinaria.
| Pregunta clave | Decisión que condiciona |
|---|---|
|
¿Qué material se va a demoler?
|
Tipo de herramienta a utilizar |
|
¿Dónde está situado?
|
Alcance del brazo, movilidad y accesos |
|
¿Qué debe conservarse?
|
Nivel de precisión y método de rotura |
|
¿Qué riesgos hay alrededor?
|
Distancia de operación y protecciones |
|
¿Cómo se retira el escombro?
|
Ritmo real de producción admitido |
|
¿Qué limitaciones tiene el entorno?
|
Peso, ventilación, ruido y suministro eléctrico |
|
¿Quién opera el equipo?
|
Formación, visibilidad y coordinación |
A partir de ahí, puedes definir una solución técnica más robusta. Por ejemplo, para una solera industrial con buen acceso quizá baste un robot medio con martillo. Para una demolición parcial junto a instalaciones sensibles, quizá interese una pinza. Para una superficie de túnel que se va a reparar después, puede ser más adecuada una fresadora.
La decisión buena rara vez es la más espectacular. Suele ser la que reduce incertidumbre, evita daños colaterales y mantiene el ritmo de trabajo sin castigar al personal.
Por qué los robots de demolición encajan donde la fuerza bruta no basta
Los robots de demolición no un sustituto automático de la maquinaria tradicional, sino una herramienta técnica muy potente cuando la obra presenta restricciones de acceso, seguridad, precisión, ventilación, carga estructural o convivencia con otras actividades.
Si quieres entender cómo funcionan los robots de demolición en obras complejas, piensa en ellos como un sistema completo: chasis, hidráulica, brazo, herramienta, operador, entorno y planificación. La máquina aporta potencia y control, pero el resultado depende de elegir bien el accesorio, revisar las condiciones de obra y coordinar la retirada de material.
En ingeniería y construcción, las buenas decisiones rara vez salen de mirar solo una ficha técnica. Salen de cruzar datos de estructura, producción, seguridad, logística y mantenimiento. Ahí es donde estos robots aportan más valor: permiten demoler con más control allí donde la fuerza bruta, por sí sola, no basta.
Referencias consultadas:
- Occupational Safety and Health Administration. (s. f.). OSHA Technical Manual: Section V, Chapter 1: Demolition.
- European Parliament and Council of the European Union. (2023). Regulation (EU) 2023/1230 of 14 June 2023 on machinery. Official Journal of the European Union. https://eur-lex.europa.eu/eli/reg/2023/1230/oj/eng
- Occupational Safety and Health Administration. (s. f.). OSHA Technical Manual: Section IV, Chapter 4: Industrial robot systems and industrial robot system safety. https://www.osha.gov/otm/section-4-safety-hazards/chapter-4
- Husqvarna Construction. (s. f.). DXR series remote demolition robots. https://www.husqvarnaconstruction.com/int/solutions/industrial-application-robots/dxr-industrial-applications/
Preguntas frecuentes sobre robots de demolición
Aclaramos las consultas más habituales sobre las capacidades, usos y justificación económica de la maquinaria robotizada en proyectos de demolición urbana.
Un robot de demolición puede realizar picado de hormigón, fragmentación, corte de elementos metálicos, fresado de superficies, saneamiento estructural, retirada de revestimientos y trabajos de demolición interior. La tarea exacta depende de la herramienta instalada y de la capacidad hidráulica del equipo.
En obras industriales, es habitual verlo en retirada de bancadas, demolición de muros, apertura de huecos, limpieza de zonas deterioradas o desmantelamiento parcial de instalaciones. En infraestructuras, se usa en túneles, estaciones, galerías, puentes y espacios donde la precisión resulta crítica.
Compensa cuando hay poco espacio, restricciones de acceso, necesidad de precisión, riesgo para el operario o limitaciones de carga estructural. También tiene sentido cuando la obra se desarrolla en interiores, zonas urbanas, plantas activas o espacios donde una máquina pesada convencional generaría demasiadas interferencias operativas.
No siempre será la opción más productiva en volumen puro. Si tienes un derribo a cielo abierto, con buen acceso y sin restricciones importantes, una excavadora tradicional puede ser más eficiente. La gran ventaja técnica del robot aparece cuando el entorno de obra exige control total.
El operario debe conocer a fondo el mando remoto, los movimientos precisos del brazo articulado, los límites de estabilidad, la gestión de las herramientas disponibles y las condiciones de seguridad del entorno. Además, debe entender cómo se comporta la carga estructural del material durante la demolición y cómo coordinarse con el personal de apoyo.
No basta con saber mover los joysticks de la máquina. Hay que interpretar la física de la obra, anticipar posibles desprendimientos, controlar la posición segura de trabajo y detectar cuándo una herramienta no está siendo la adecuada. En este tipo de intervenciones técnicas, la experiencia operativa y la formación técnica especializada van de la mano indisolublemente.
Funcionan esencialmente como plataformas compactas de demolición controladas a distancia. El robot, gracias a su chasis sobre orugas, se desplaza hasta la zona de trabajo, se estabiliza con sus apoyos, acciona un potente brazo hidráulico y utiliza una herramienta específica para romper, cortar, triturar o fresar el material objetivo.
El operario dirige todo el equipo desde un mando remoto inalámbrico, lo que le permite mantenerse mucho más alejado del punto crítico de demolición evitando riesgos. Esa combinación única de alta movilidad en espacios reducidos, gran potencia hidráulica y control a distancia explica por qué se utilizan tan frecuentemente en interiores, túneles, rehabilitaciones de fábricas y zonas de muy difícil acceso.







